Cartepole QLearning
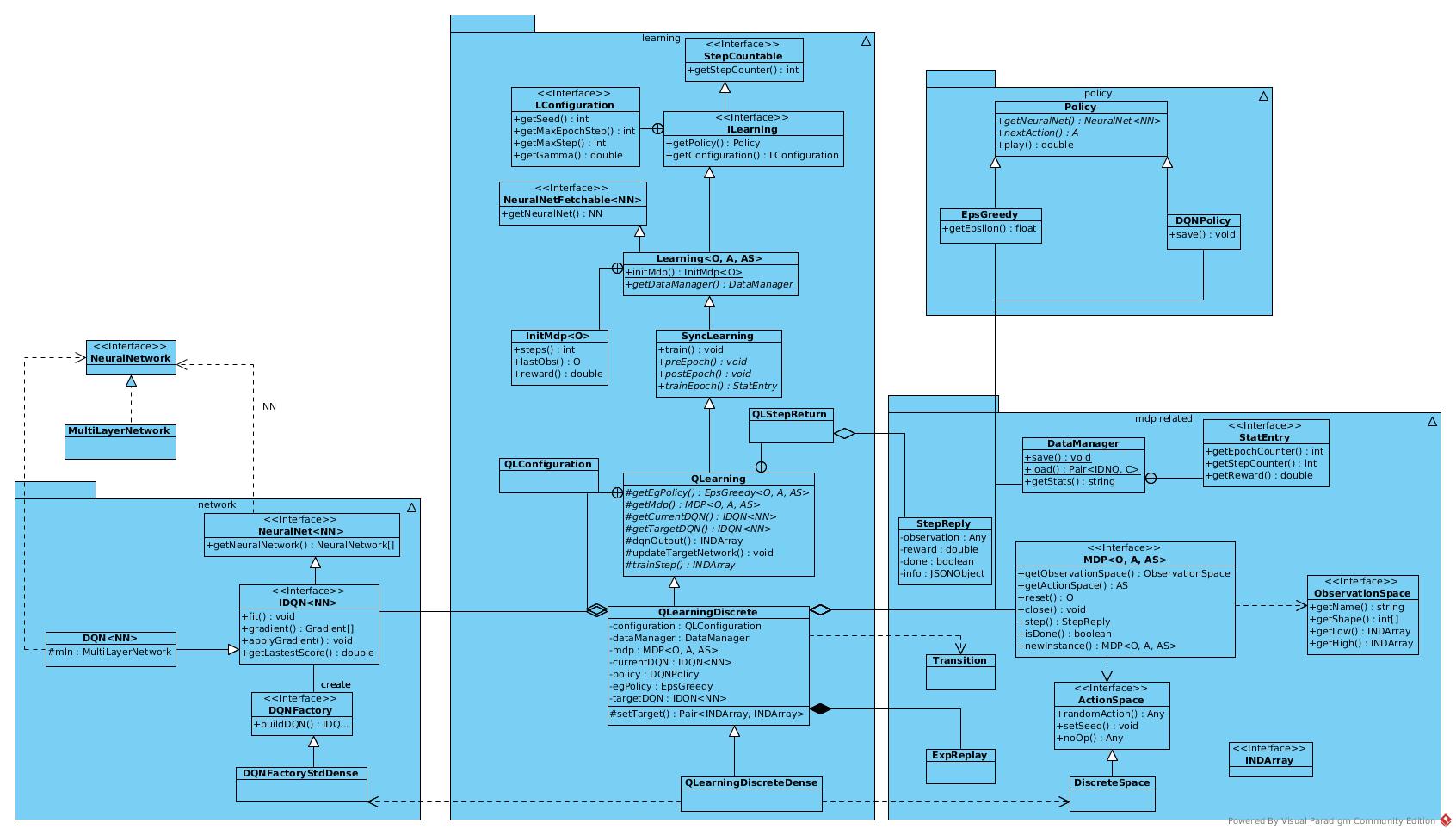
Architecture
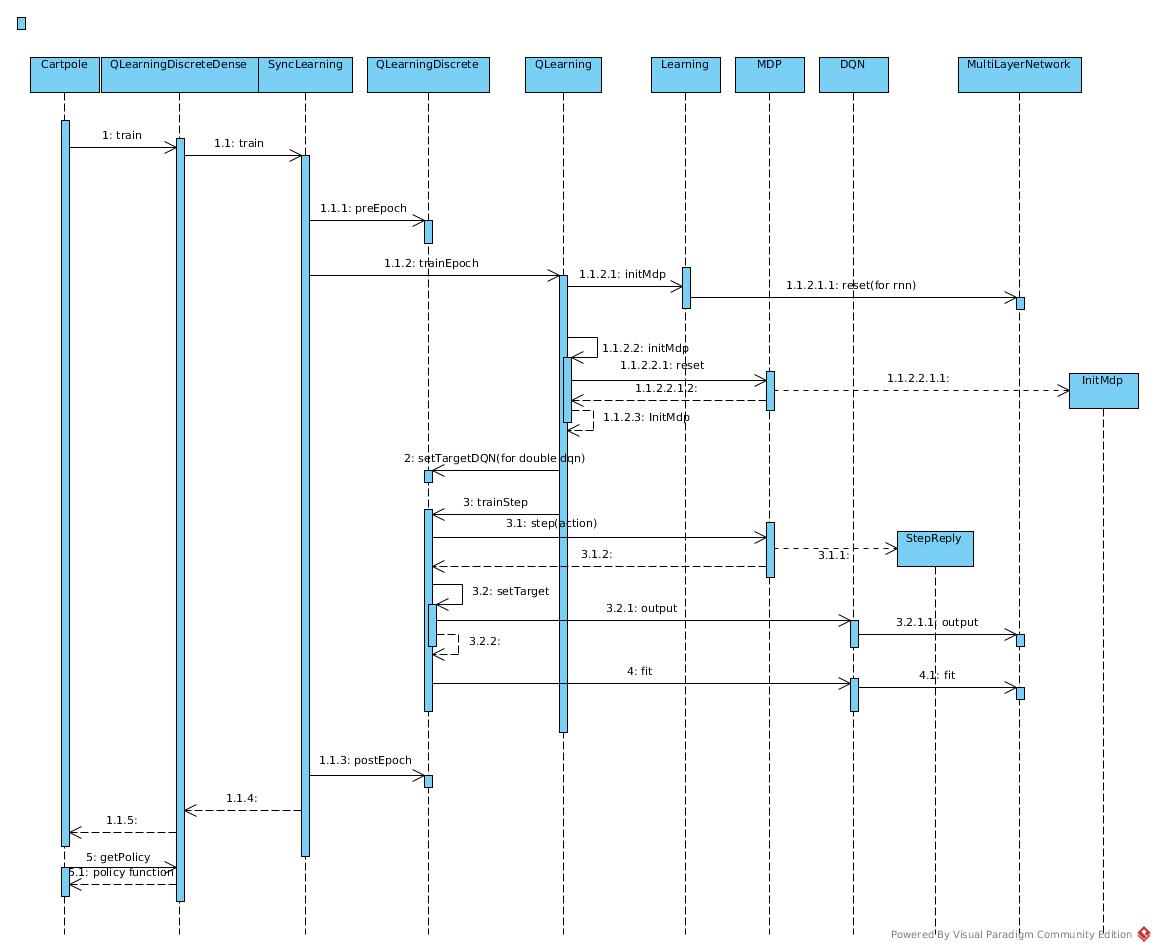
Sequence
Algorithm
SARS
protected StatEntry trainEpoch() {
//Execute initial steps to get the first meaningful state
InitMdp<O> initMdp = initMdp();
O obs = initMdp.getLastObs();
//For stats
double reward = initMdp.getReward();
int step = initMdp.getSteps();
Double startQ = Double.NaN;
double meanQ = 0;
int numQ = 0;
List<Double> scores = new ArrayList<>();
while (step < getConfiguration().getMaxEpochStep() && !getMdp().isDone()) {
//For double DQN
if (getStepCounter() % getConfiguration().getTargetDqnUpdateFreq() == 0) {
updateTargetNetwork();
}
//Step = action + next state + (reward)
QLStepReturn<O> stepR = trainStep(obs);
if (!stepR.getMaxQ().isNaN()) {
if (startQ.isNaN())
startQ = stepR.getMaxQ();
numQ++;
meanQ += stepR.getMaxQ();
}
if (stepR.getScore() != 0)
scores.add(stepR.getScore());
reward += stepR.getStepReply().getReward();
obs = stepR.getStepReply().getObservation();
incrementStep();
step++;
}
//stats
meanQ /= (numQ + 0.001); //avoid div zero
StatEntry statEntry = new QLStatEntry(getStepCounter(), getEpochCounter(), reward, step, scores,
getEgPolicy().getEpsilon(), startQ, meanQ);
return statEntry;
}
A single step
protected QLStepReturn<O> trainStep(O obs) {
Integer action;
INDArray input = getInput(obs);
// historyProcessor is for image record processing and cache(storage of circularqueue)
boolean isHistoryProcessor = getHistoryProcessor() != null;
if (isHistoryProcessor)
getHistoryProcessor().record(input);
// stack #skipFrame frames as one input
int skipFrame = isHistoryProcessor ? getHistoryProcessor().getConf().getSkipFrame() : 1;
int historyLength = isHistoryProcessor ? getHistoryProcessor().getConf().getHistoryLength() : 1;
// warm up
int updateStart = getConfiguration().getUpdateStart()
+ ((getConfiguration().getBatchSize() + historyLength) * skipFrame);
Double maxQ = Double.NaN; //ignore if Nan for stats
//if step of training, just repeat lastAction
if (getStepCounter() % skipFrame != 0) {
action = lastAction;
} else {
if (history == null) {
if (isHistoryProcessor) {
// Push input into queue to construct complete history
getHistoryProcessor().add(input);
// Get the frames to be stacked
history = getHistoryProcessor().getHistory();
} else
history = new INDArray[] {input};
}
//concat the history into a single INDArray input
INDArray hstack = Transition.concat(Transition.dup(history));
if (isHistoryProcessor) {
hstack.muli(1.0 / getHistoryProcessor().getScale());
}
//if input is not 2d, you have to append that the batch is 1 length high
if (hstack.shape().length > 2)
hstack = hstack.reshape(Learning.makeShape(1, ArrayUtil.toInts(hstack.shape())));
// Get Q(s, a)
INDArray qs = getCurrentDQN().output(hstack);
// Get max a's index
int maxAction = Learning.getMaxAction(qs);
// For return
maxQ = qs.getDouble(maxAction);
// epsilon-greedy
// Seemed run nn forward repetatively. Waste
action = getEgPolicy().nextAction(hstack);
}
lastAction = action;
// Execute action and prepare for return value
StepReply<O> stepReply = getMdp().step(action);
accuReward += stepReply.getReward() * configuration.getRewardFactor();
//if it's not a skipped frame, you can do a step of training
if (getStepCounter() % skipFrame == 0 || stepReply.isDone()) {
// The lastest action reply had not been put into history
// Why not put it into history immedately after action?
INDArray ninput = getInput(stepReply.getObservation());
if (isHistoryProcessor)
getHistoryProcessor().add(ninput);
INDArray[] nhistory = isHistoryProcessor ? getHistoryProcessor().getHistory() : new INDArray[] {ninput};
// Add into replay memory
Transition<Integer> trans = new Transition(history, action, accuReward, stepReply.isDone(), nhistory[0]);
getExpReplay().store(trans);
// Train the NN
if (getStepCounter() > updateStart) {
// Construct labels
Pair<INDArray, INDArray> targets = setTarget(getExpReplay().getBatch());
getCurrentDQN().fit(targets.getFirst(), targets.getSecond());
}
history = nhistory;
accuReward = 0;
}
return new QLStepReturn<O>(maxQ, getCurrentDQN().getLatestScore(), stepReply);
}
Prepare input and labels for NN
protected Pair<INDArray, INDArray> setTarget(ArrayList<Transition<Integer>> transitions) {
if (transitions.size() == 0)
throw new IllegalArgumentException("too few transitions");
int size = transitions.size();
// {getHistoryLength(), getCroppingHeight(), getCroppingWidth()}
int[] shape = getHistoryProcessor() == null ? getMdp().getObservationSpace().getShape()
: getHistoryProcessor().getConf().getShape();
// size * len * h * w
int[] nshape = makeShape(size, shape);
INDArray obs = Nd4j.create(nshape);
INDArray nextObs = Nd4j.create(nshape);
int[] actions = new int[size];
boolean[] areTerminal = new boolean[size];
for (int i = 0; i < size; i++) {
Transition<Integer> trans = transitions.get(i);
areTerminal[i] = trans.isTerminal();
actions[i] = trans.getAction();
INDArray[] obsArray = trans.getObservation();
if (obs.rank() == 2) {
obs.putRow(i, obsArray[0]);
} else {
for (int j = 0; j < obsArray.length; j++) {
// index of size = i, index of len = j
obs.put(new INDArrayIndex[] {NDArrayIndex.point(i), NDArrayIndex.point(j)}, obsArray[j]);
}
}
INDArray[] nextObsArray = Transition.append(trans.getObservation(), trans.getNextObservation());
if (nextObs.rank() == 2) {
nextObs.putRow(i, nextObsArray[0]);
} else {
for (int j = 0; j < nextObsArray.length; j++) {
nextObs.put(new INDArrayIndex[] {NDArrayIndex.point(i), NDArrayIndex.point(j)}, nextObsArray[j]);
}
}
}
// Normalization, scale = 255
if (getHistoryProcessor() != null) {
obs.muli(1.0 / getHistoryProcessor().getScale());
nextObs.muli(1.0 / getHistoryProcessor().getScale());
}
// Get Q(s, a), size * #actions
INDArray dqnOutputAr = dqnOutput(obs);
// Get Q(s', a')
INDArray dqnOutputNext = dqnOutput(nextObs);
INDArray targetDqnOutputNext = null;
INDArray tempQ = null;
INDArray getMaxAction = null;
if (getConfiguration().isDoubleDQN()) {
targetDqnOutputNext = targetDqnOutput(nextObs);
getMaxAction = Nd4j.argMax(dqnOutputNext, 1);
} else {
// For each s', get maxQ_hat|a', size * 1
tempQ = Nd4j.max(dqnOutputNext, 1);
}
for (int i = 0; i < size; i++) {
double yTar = transitions.get(i).getReward();
if (!areTerminal[i]) {
double q = 0;
if (getConfiguration().isDoubleDQN()) {
q += targetDqnOutputNext.getDouble(i, getMaxAction.getInt(i));
} else
q += tempQ.getDouble(i);
// y = gamma * maxQ_hat + r
yTar += getConfiguration().getGamma() * q;
}
// Remove less possible output
double previousV = dqnOutputAr.getDouble(i, actions[i]);
double lowB = previousV - getConfiguration().getErrorClamp();
double highB = previousV + getConfiguration().getErrorClamp();
double clamped = Math.min(highB, Math.max(yTar, lowB));
// Only update the expected output element corresponding to max Q_hat
dqnOutputAr.putScalar(i, actions[i], clamped);
}
return new Pair(obs, dqnOutputAr);
}
}
Neural Network: *DQNFactoryStd**.java
public DQN buildDQN(int[] numInputs, int numOutputs) {
//...
// Loss function = (expected output get from setTarget - output) ^ 2
// The NN compute the forward of input again. Waste as it had been computed in setTarget?
confB.layer(conf.getNumLayer(), new OutputLayer.Builder(LossFunctions.LossFunction.MSE).activation(Activation.IDENTITY)
.nIn(conf.getNumHiddenNodes()).nOut(numOutputs).build());
// ...
}