#Chapter04
4.1
qπ(s,a) = ∑s’p(s’|s,a) * [r + γ * vπ(s’)]
| p(s’ | s,a) = 1, r = -1, γ = 1 |
qπ(11, down) = -1 + v(T)
qπ(7, down) = -1 + v(11)
4.2
|S|1|2|3| |—|—|—|—| |4|5|6|7| |8|9|10|11| |12|13|14|T| |X|15|X|X|
| v(s) = ∑aπ(a | s) ∑s’p(s’ | s,a)[r + γ * vπ(s’)] |
| π(a | s) = 1/4, p(s’ | s,a) = 1, r = -1, γ = 1 |
v(15) = 1/4 * [(-1 + v(12)) + (-1 + v(13)) + (-1 + v(14)) + (-1 + v(15))]
= -1 + [v(12) + v(13) + v(14) + v(15)] / 4
v(13) = -1 + [v(9) + v(12) + v(14) + v(15)] / 4
Solve equations:
v(13) = -20, v(15) = -20
4.3
qπ(s,a) = Eπ[R + γG’ | s,a]
| = Eπ[R + γv(s’) | s,a] |
| = Eπ[R + γ∑a’π(a’ | s’) * qπ(s’,a’) | s,a] |
= ∑s’p(s’|s,a) * [R + γ∑a’π(a’|s’) * qπ(s’,a’)]
4.4
- Set threshold for steps updated per state/per evaluation, no update when threshold reached
- Set threshold for state value, no update when threshold reached
- Set γ < 1
- Check policy to detect negative infinite loop
4.5
4.6
1. Initiation Initialize Q(s,a) ∀{s,a | s∈S,a∈A}; initialize π(s) ∀s∈S 2. Policy Evaluation Repeat ∆ <- 0 for each (s,a) ∈ SxA: q <- Q(s,a) Q(s,a) <- ∑(s')p(s'|s,a) * [R + γ∑(a')π(a'|s') * q[π](s',a')] ∆ <- max(∆, |Q(s,a) - q|) until ∆ < θ 3. Policy Improvement policy-stable <- true For each s ∈ S: a <- π(s) π(s) <- argmax(a)Q(s,a) if a != π(s): then policy-stable = false if policy-stable: then stop else: goto 24.7
Step1
Initialize π(s) = ϵ * u(s) + (1 - ϵ) * A / |A|, u(s) = original π(s) in figure 4.3
Step2
V(s) = ϵ * ∑s’p(s’|s,a)[r + γ * Vu(s’)] + (1 - ϵ) / |A| * ∑a∑s’p(s’|s,a) * [r + γ * V(s’)]
Step3
u(s) = argmaxa∑s’p(s’|s,a) * [r + γv(s’)]
4.8
Seemed that the original implementation breaks tie by order. That is, the algorithm is looking for most rewarded, and the fastest solution at the same time.
So in s = 50, action = 50 get the best value as it has chance to win in 1 step with possibility = PH. Similarly, in s = 25, action = 25 get the best value. While as the 25 % 2 == 1, there is no similar spike in s = 12/13.
Then for s = 51, the best choice is to bet 1. In winning case, the player get positive reward; in lost case, the player reach s = 50, a good state. For s = 52, 53, …, the V(s) is looking for balance between going back to s = 50 with negative reward and going forward to relative better states.
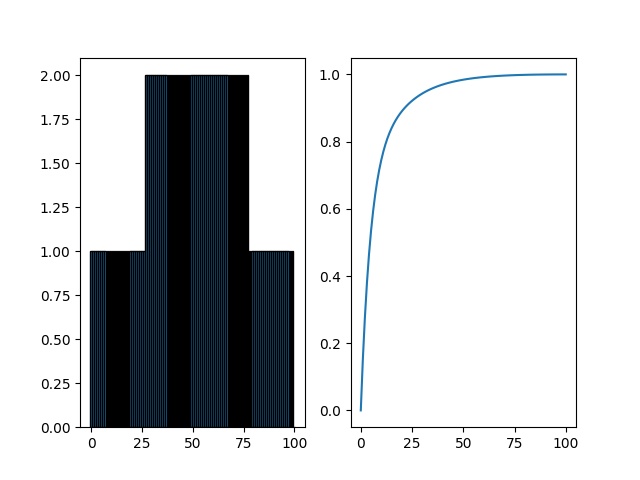
4.9
Figure for ph = 0.25
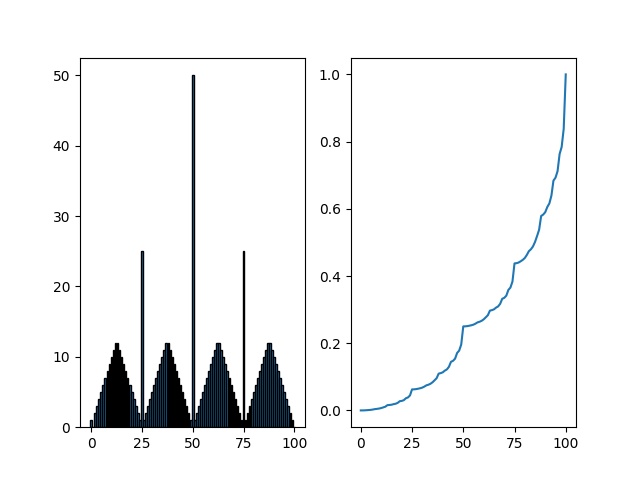
Figure for ph = 0.55
4.10
q(s,a) = ∑s’p(s’|s,a) * [r + γmaxa’q(s’,a’)]